UTS
1.3 Dasar Teori [kembali]
a. Untuk memenuhi tugas UTS Mikroprosessor dan Mikrokontroller
b. Untuk mengetahui prinsip kerja dari aplikasi kontrol kecepatan motor
a. Arduino UNO
b. Driver Motor (L293D)
c. Optocoupler
d. MAX7219
e. Dot matrix
f. Motor DC
g. Jumper
g. Jumper
A. Arduino
Arduino adalah kit elektronik atau
papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama
yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel.
Arduino yang kita gunakan pada prkatikum ini adalah arduino mega yang
menggunakan chip AVR ATmega 2560 yang memiliki fasilitas PWM, komunikasi
serial, ADC, timer, interupt, SPI dan I2C. Sehingga Arduino bisa digabungkan
bersama modul atau alat lain dengan protocol yang berbeda-beda. Bahasa
pemograman yang digunakan adalah bahasa C. Tetapi bahasa ini sudah dipermudah
menggunakan fungsi-fungsi yang sederhana sehingga lebih mudah dalam
memprogramnya. Dalam memprogram arduino, kita bisa menggunakan serial
komunikasi agar arduino dapat berhubungan dengan komputer ataupun aplikasi
lain.
Beberapa fitur dari Arduino Mega 2560 ini adalah :

|
Microcontroller
|
ATmega2560
|
|
Operating Voltage
|
5V
|
|
Input Voltage (recommended)
|
7-12V
|
|
Input Voltage (limits)
|
6-20V
|
|
Digital I/O Pins
|
54 (of which 15 provide PWM output)
|
|
Analog Input Pins
|
16
|
|
DC Current per I/O Pin
|
20 mA
|
|
DC Current for 3.3V Pin
|
50 mA
|
|
Flash Memory
|
256 KB of which 8 KB used by bootloader
|
|
SRAM
|
8 KB
|
|
EEPROM
|
4 KB
|
|
Clock Speed
|
16 MHz
|
BAGIAN-BAGIAN DARI ARDUINO MEGA 2560
·
Soket USB
Soket USB adalah soket untuk
kabel USB yang disambungkan ke komputer atau laptop.
Berfungsi untuk mengirimkan program ke Arduino dan
juga sebagai port komunikasi serial.
·
Input /
Output Digital
Input/Output Digital atau
digital pin adalah pin-pin untuk menghubungkan Arduino dengan
komponen atau rangkaian
digital. Pada Arduino Mega terdapat 53
I/O Digital dimana 16
diantaranya dapat dijadikan sebagai output PWM
- Input Analog
Input Analog atau analog pin adalah
pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian
analog. Misalnya dari potensiometer, sensor suhu, sensor cahaya, dsb.
Terdapat 16 input analog pada arduino mega 2560.
- · Pin POWER
Pin-pin catu daya adalah pin
yang memberikan tegangan untuk komponen atau rangkaian yang dihubungkan dengan
Arduino. Pada bagian catu daya ini terdapat juga pin Vin dan Reset.Vin
digunakan untuk memberikan tegangan langsung kepada Arduino tanpa melalui
tegangan USB atau adaptor.
- · Tombol RESET
Reset adalah pin untuk
memberikan sinyal reset melaui tombol atau rangkaian eksternal.
- · Jack Baterai/Adaptor
Soket baterai atau
adaptor digunakan untuk menyuplai Arduino dengan tegangan dari
baterai/adaptor 9V pada saat Arduino sedang tidak disambungkan ke komputer.
Kalau Arduino sedang disambungkan ke komputer melalui USB, Arduino mendapatkan
suplai tegangan dari USB, jadi tidak perlu memasang baterai/adaptor saat
memprogram Arduino.
B. Driver
Motor (L293D)
IC L293D
adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan
dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan
driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif
karena di dalam driver L293D sistem driver yang digunakan adalah totem pool.
Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri
sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya.
Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
Konstruksi pin driver motor DC IC l293D adalah sebagai berikut. Konstruksi Pin
Driver Motor DC IC L293D

Fungsi Pin Driver Motor DC IC L293D
- Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
- Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
- Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
- Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
- Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Feature Driver Motor DC IC L293D
Driver motor DC IC L293D memiliki feature yang lengkap
untuk sebuah driver motor DC sehingga dapat diaplikasikan dalam beberapa teknik
driver motor DC dan dapat digunakan untuk mengendalikan beberapa jenis motor
DC. Feature yang dimiliki driver motor DC IC L293D sesuai dengan datasheet
adlah sebagai berikut :
- Wide Supply-Voltage Range: 4.5 V to 36 V
- Separate Input-Logic Supply
- Internal ESD Protection
- Thermal Shutdown
- High-Noise-Immunity Inputs
- Functionally Similar to SGS L293 and SGS L293D
- Output Current 1 A Per Channel (600 mA for L293D)
- Peak Output Current 2 A Per Channel (1.2 A for L293D)
- Output Clamp Diodes for Inductive Transient Suppression (L293D)
Rangkaian Aplikasi Driver Motor DC
IC L293D

Pada
gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver
motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.
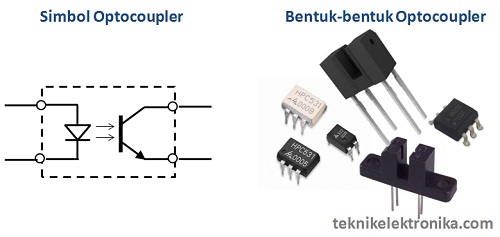
C. Optocoupler
Pengertian Optocoupler dan Prinsip
Kerjanya – Dalam Dunia Elektronika, Optocoupler
juga dikenal dengan sebutan Opto-isolator, Photocoupler atau Optical Isolator.
Optocoupler adalah komponen elektronika yang berfungsi sebagai penghubung
berdasarkan cahaya optik. Pada dasarnya Optocoupler terdiri dari 2 bagian utama
yaitu Transmitter yang berfungsi sebagai pengirim cahaya optik dan Receiver
yang berfungsi sebagai pendeteksi sumbercahaya.
Masing-masing bagian Optocoupler (Transmitter dan Receiver) tidak memiliki hubungan konduktif rangkaian secara langsung tetapi dibuat sedemikian rupa dalam satu kemasan komponen.
Masing-masing bagian Optocoupler (Transmitter dan Receiver) tidak memiliki hubungan konduktif rangkaian secara langsung tetapi dibuat sedemikian rupa dalam satu kemasan komponen.
Simbol dan Bentuk Optocoupler
Dibawah ini adalah Simbol Optocoupler dan Bentuk-bentuknya :
Jenis-jenis Optocoupler
Jenis-jenis Optocoupler yang sering ditemukan adalah
Optocoupler yang terbuat dari bahan Semikonduktor dan terdiri dari kombinasi
LED (Light Emitting Diode) dan Phototransistor. Dalam Kombinasi ini, LED
berfungsi sebagai pengirim sinyal cahaya optik (Transmitter) sedangkan
Phototransistor berfungsi sebagai penerima cahaya tersebut (Receiver).
Jenis-jenis lain dari Optocoupler diantaranya adalah kombinasi LED-Photodiode,
LED-LASCR dan juga Lamp-Photoresistor.
Prinsip Kerja Optocoupler
Pada prinsipnya, Optocoupler
dengan kombinasi LED-Phototransistor adalah Optocoupler yang terdiri dari
sebuah komponen LED (Light Emitting Diode) yang memancarkan cahaya infra merah
(IR LED) dan sebuah komponen semikonduktor yang peka terhadap cahaya
(Phototransistor) sebagai bagian yang digunakan untuk mendeteksi cahaya infra
merah yang dipancarkan oleh IR LED. Untuk lebih jelas mengenai Prinsip kerja
Optocoupler, silakan lihat rangkaian internal komponen Optocoupler dibawah ini
:

Dari gambar diatas dapat dijelaskan bahwa Arus listrik yang mengalir melalui IR
LED akan menyebabkan IR LED memancarkan sinyal cahaya Infra merahnya.
Intensitas Cahaya tergantung pada jumlah arus listrik yang mengalir pada IR LED
tersebut. Kelebihan Cahaya Infra Merah adalah pada ketahanannya yang lebih baik
jika dibandingkan dengan Cahaya yang tampak. Cahaya Infra Merah tidak dapat
dilihat dengan mata telanjang.
Cahaya Infra Merah yang
dipancarkan tersebut akan dideteksi oleh Phototransistor dan menyebabkan
terjadinya hubungan atau Switch ON pada Phototransistor. Prinsip kerja
Phototransistor hampir sama dengan Transistor Bipolar biasa, yang membedakan
adalah Terminal Basis (Base) Phototransistor merupakan penerima yang peka
terhadap cahaya.
Aplikasi Optocoupler
Optocoupler banyak
diaplikasikan sebagai driver pada rangkaian pada Mikrokontroller, driver pada
Motor DC, DC dan AC power control dan juga pada komunikasi rangkaian yang
dikendalikan oleh PC (Komputer).
D. Dot Matrix
Teori LED dot matriks layar
Dalam layar
dot matrix, beberapa LED yang kabel bersama-sama dalam baris dan kolom. Hal
ini dilakukan untuk meminimalkan jumlah pin yang diperlukan untuk mengusir
mereka. Misalnya, 8 × 8 matriks LED (ditampilkan di bawah) akan
membutuhkan 64 I / O pin, satu untuk setiap pixel LED. Dengan kabel semua
anoda bersama-sama dalam baris (R1 melalui R8), dan katoda dalam kolom (C1
melalui C8), jumlah yang diperlukan pin I / O dikurangi menjadi 16. Setiap
LED ditujukan demi baris dan jumlah kolom. Pada gambar bawah ini, jika R4
adalah ditarik tinggi dan C3 ditarik rendah, LED di baris keempat dan kolom
ketiga akan dihidupkan. Karakter dapat ditampilkan oleh pemindaian cepat
baik baris atau kolom. Tutorial ini akan membahas metode pemindaian kolom.

Struktur dari 8x8 LED dot matriks
Matriks LED digunakan dalam percobaan ini adalah
ukuran 5 × 7. Kita akan belajar bagaimana menampilkan karakter yang masih
dalam format standar 5 7 × pixel. Gambar di bawah menunjukkan yang LED
harus diaktifkan untuk menampilkan abjad Inggris 'A'. Para 7 baris dan 5
kolom dikendalikan melalui pin mikrokontroler. Sekarang, mari kita lihat
secara detailcarakerjanya.
Misalkan, kita ingin menampilkan A. alfabet Kami akan memilih kolom C1 (yang berarti C1 ditarik rendah dalam kasus ini), dan kolom hapus lainnya dengan memblokir jalan tanah mereka (salah satu cara untuk melakukan hal itu adalah dengan menarik C2 melalui C5 pin untuk tinggi logika). Sekarang, kolom pertama aktif, dan Anda perlu mengaktifkan LED di baris R2 melalui R7 kolom ini, yang dapat dilakukan dengan menerapkan tegangan bias maju untuk baris ini. Selanjutnya, pilih kolom C2 (dan hapus semua kolom lainnya), dan menerapkan bias maju ke R1 dan R5, dan sebagainya. Oleh karena itu, dengan memindai seluruh kolom cepat (> 100 kali per detik), dan menyalakan LED masing-masing di setiap baris kolom itu, kegigihan visi datang untuk bermain, dan kami merasakan tampilan gambar seperti yang masih.
Misalkan, kita ingin menampilkan A. alfabet Kami akan memilih kolom C1 (yang berarti C1 ditarik rendah dalam kasus ini), dan kolom hapus lainnya dengan memblokir jalan tanah mereka (salah satu cara untuk melakukan hal itu adalah dengan menarik C2 melalui C5 pin untuk tinggi logika). Sekarang, kolom pertama aktif, dan Anda perlu mengaktifkan LED di baris R2 melalui R7 kolom ini, yang dapat dilakukan dengan menerapkan tegangan bias maju untuk baris ini. Selanjutnya, pilih kolom C2 (dan hapus semua kolom lainnya), dan menerapkan bias maju ke R1 dan R5, dan sebagainya. Oleh karena itu, dengan memindai seluruh kolom cepat (> 100 kali per detik), dan menyalakan LED masing-masing di setiap baris kolom itu, kegigihan visi datang untuk bermain, dan kami merasakan tampilan gambar seperti yang masih.

Sebuah standar 5x7 dot matriks layar LED struktur
Tabel di
bawah ini memberikan tingkat logika untuk diterapkan ke R1 melalui R7 untuk
setiap kolom untuk menampilkan abjad 'A'.

Row nilai untuk menampilkan abjad
A

Scanning seluruh kolom dan makan dengan nilai-nilai baris yang sesuai
Anda harus telah mencatat bahwa di setiap baris, satu
pin adalah sumber arus hanya satu LED pada suatu waktu, tapi pin kolom mungkin
harus tenggelam arus dari lebih dari satu LED. Misalnya, kolom C1 harus
dapat tenggelam arus dari 6 LED sementara menampilkan 'A' alfabet. I / O
Sebuah pin mikrokontroler tidak dapat tenggelam ini banyak saat ini, array
transistor sehingga eksternal yang diperlukan. Saya menggunakan ULN2003A IC yang memiliki tujuh built-in array
transistor Darlington (lihat di bawah). Masukan dari ULN2003A
tinggi aktif. Ini berarti pin input harus disertakan dengan logika yang
tinggi untuk membawa pin output yang sesuai ke tanah. Skema dari array
transistor Darlington dalam chip ULN2003A ditampilkan di bawah.

Pin diagram dan skematik ULN2003A (Darlington transistor array)
Sirkuit
Pengaturan
Setup sirkuit untuk percobaan ini cukup sederhana. Anda
membutuhkan tujuh 330 Ω resistor secara seri dengan R1 baris melalui R7 untuk
membatasi arus yang melalui LED. Kemudian baris yang didorong oleh RB0
melalui RB6 pin dari PIC18F2550. Kolom terhubung ke lima output dari
ULN2003A. Pin input yang sesuai lima ULN2003A IC dikendalikan oleh RA0
melalui RA4 pin dari PIC18F2550. Mikrokontroler akan, oleh karena itu,
scan di kolom dengan mengirimkan bit sesuai dengan Porta. Misalnya,
pengaturan RA0 ke 1 dan kliring RA1 melalui RA4 bit, akan memilih kolom
pertama. Mikrokontroler akan menunggu sekitar 1 ms sebelum beralih ke
kolom berikutnya. Pada setiap kolom,
mikrokontroler akan menampilkan nilai baris yang sesuai di PORTB untuk
menyalakan LED yang sesuai dalam kolom yang diperlukan untuk menampilkan
karakter khusus. Beralih antara kolom cukup cepat untuk menipu mata
manusia dan karakter stabil ditampilkan.

E. JUMPER

Sebagai konektor antar modul satu dengan modul lainnya
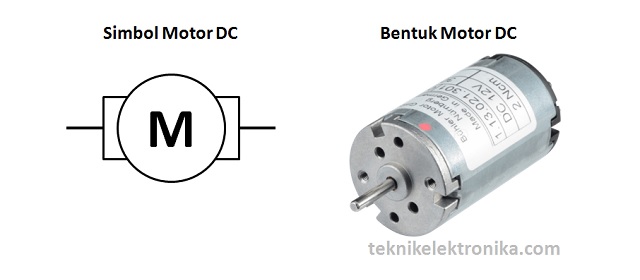
F. Motor DC
Pengertian
Motor DC dan Prinsip Kerjanya – Motor Listrik DC atau DC Motor
adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau
gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus
Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan
arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor
Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan
listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC
dan Bor Listrik DC.
Motor Listrik DC atau DC Motor ini menghasilkan sejumlah putaran per
menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute)
dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum jam
apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan.
Motor Listrik DC tersedia dalam berbagai ukuran rpm dan bentuk. Kebanyakan
Motor Listrik DC memberikan kecepatan rotasi sekitar 3000 rpm hingga 8000
rpm dengan tegangan operasional dari 1,5V hingga 24V. Apabile tegangan yang
diberikan ke Motor Listrik DC lebih rendah dari tegangan operasionalnya maka
akan dapat memperlambat rotasi motor DC tersebut sedangkan tegangan yang lebih
tinggi dari tegangan operasional akan membuat rotasi motor DC menjadi lebih
cepat. Namun ketika tegangan yang diberikan ke Motor DC tersebut turun menjadi
dibawah 50% dari tegangan operasional yang ditentukan maka Motor DC tersebut
tidak dapat berputar atau terhenti. Sebaliknya, jika tegangan yang diberikan ke
Motor DC tersebut lebih tinggi sekitar 30% dari tegangan operasional yang
ditentukan, maka motor DC tersebut akan menjadi sangat panas dan akhirnya akan
menjadi rusak.
Pada saat Motor listrik DC berputar tanpa beban, hanya sedikit arus listrik
atau daya yang digunakannya, namun pada saat diberikan beban, jumlah arus yang
digunakan akan meningkat hingga ratusan persen bahkan hingga 1000% atau lebih
(tergantung jenis beban yang diberikan). Oleh karena itu, produsen Motor DC
biasanya akan mencantumkan Stall Current pada Motor DC. Stall
Current adalah arus pada saat poros motor berhenti karena mengalami beban
maksimal.
Bentuk dan Simbol Motor DC

Prinsip Kerja Motor DC

Terdapat dua bagian utama pada
sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator
adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari
rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang
berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini
dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah
Yoke (kerangka magnet), Poles (kutub motor), Field winding
(kumparan medan magnet), Armature Winding (Kumparan Jangkar),
Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik
DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik
diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak
menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan
akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan
bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu
dengan kutub utara magnet maka akan terjadi saling tarik menarik yang
menyebabkan pergerakan kumparan berhenti.Untuk
menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub
magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan
akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi
kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan
akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan
berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi
tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan
berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara
magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan
akan berputar lagi karena adanya perubahan kutub. Siklus ini akan
berulang-ulang hingga arus listrik pada kumparan diputuskan

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tidak ada komentar:
Posting Komentar